rgb-麻将胡了pg电子网站
订阅方案:
普通用户:¥30.00
vip用户:¥0.00
联系客服
查看订阅方案
数据集简介:
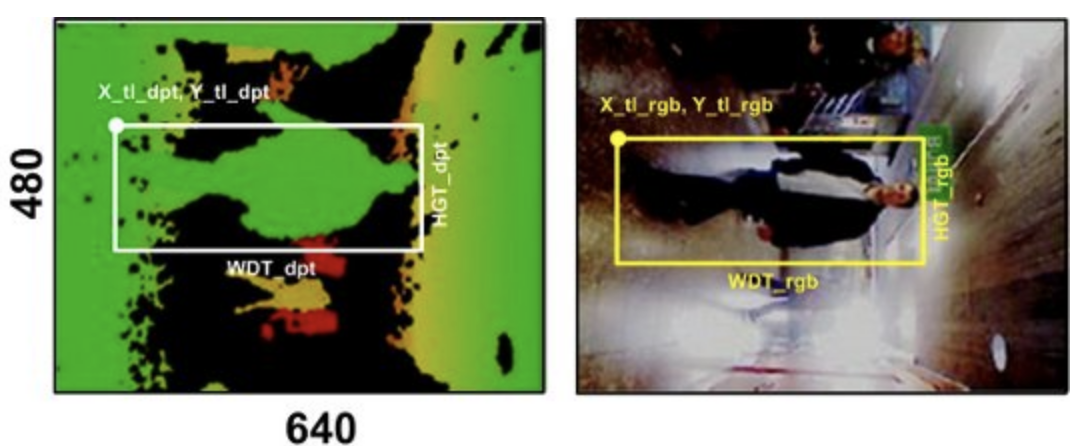
数据集介绍 该数据集包含在大学礼堂中从三个垂直安装的 kinect 传感器获取的 3000 多个 rgb-d 帧。数据主要包含从不同方向和不同遮挡程度看到的直立行走和站立的人。 annotation format: each annotated track is defined in a file named as track000n.dat . the file describes the
推荐数据集
-
isaid航空图像大规模数据集
共享description有的 earth vision 数据集要么适用于语义分割,要么适用于对象检测。 isaid 是第一个用于航空图像实例分割的基准数据集。这个大规模和密集注释的数据集包含 2,806 张高分辨率图像的 15 个类别的 655,451 个对象实例。 isaid 的显着特征如下:(a) 大量具有高空间分辨率的图像,(b) 十五个重要且常见的类别,(c) 每个类别的大量实例,(d) 每
-
脑肿瘤 mri 数据集
共享该数据集包含7022张人脑 mri 图像,分为 4 类:胶质瘤-脑膜瘤-无肿瘤和垂体。注意这个数据集中的图像大小是不同的。可以在预处理并去除多余的边距后将图像调整为所需的大小。
-

德国交通标志识别数据集
共享“德国交通标志识别基准”是在 2011 年国际神经网络联合会议 (ijcnn) 上举办的多类单图像分类挑战赛。交通标志的自动识别是高级驾驶辅助系统所必需的,并且构成了具有挑战性的现实世界计算机视觉和模式识别问题。该数据集收集了超过 50,000 个交通标志图像的全面、逼真的数据集。它反映了由于距离、照明、天气条件、部分遮挡和旋转而导致的标志视觉外观的强烈变化。这些图像由几个预先计算的特征集补充,以
-

飞机数据集
共享数据集包含 10,000 张飞机图像,数据分为 3334 个训练图像、3333 个验证图像和 3333 个测试图像。 飞机模型按四级层次结构组织。 四个层次,从细到粗,分别是: 型号,例如 波音 737-76j。 由于某些模型在视觉上几乎无法区分,因此在评估中不使用此级别。变体,例如 波音 737-700。 一个变体将所有在视觉上无法区分的模型折叠成一个类。 该数据集包含 100 个不同的变体。家

客服微信