血细胞图像数据集-麻将胡了pg电子网站
订阅方案:
普通用户:¥30.00
vip用户:¥0.00
联系客服
查看订阅方案
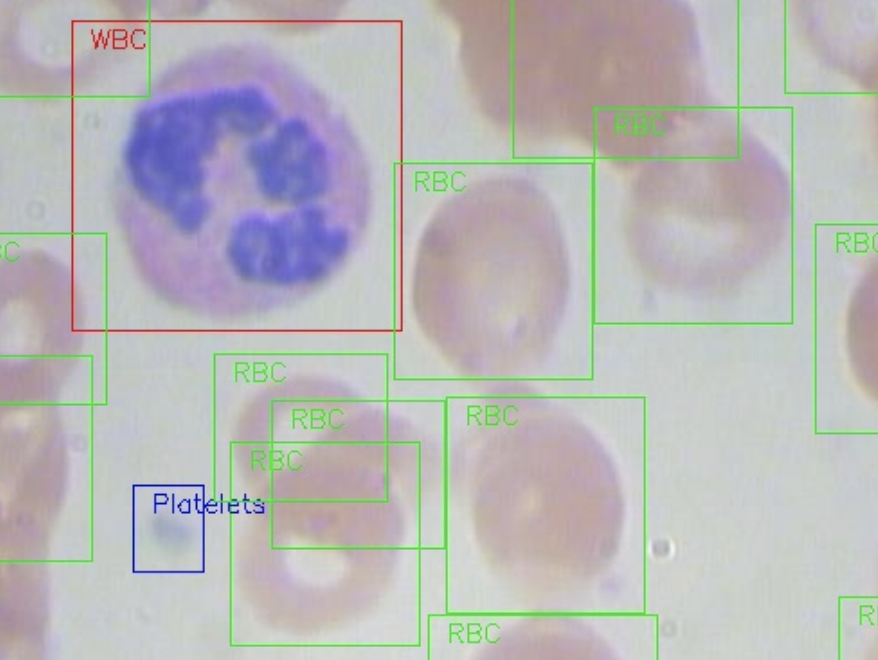
数据集简介:
该数据集包含 12,500 张带有细胞类型标签 (csv) 的增强血细胞图像 (jpeg)。4 种不同细胞类型中的每一种都有大约 3,000 张图像,这些图像被分组到 4 个不同的文件夹中(根据细胞类型)。细胞类型是嗜酸性粒细胞、淋巴细胞、单核细胞和中性粒细胞。该数据集附带一个额外的数据集,其中包含原始 410 幅图像(预增强)以及两个额外的子类型标签(wbc 与 wbc),以及这 410 幅图像
推荐数据集
-

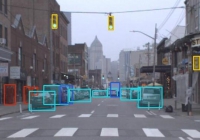
cbcl 街道场景数据
共享streetscenes challenge framework 是用于对象检测的图像、注释、软件和性能测量的集合。 每张图像都是从马萨诸塞州波士顿及其周边地区的 dsc-f717 相机拍摄的。 然后用围绕 9 个对象类别的每个示例的多边形手动标记每个图像,包括 [汽车、行人、自行车、建筑物、树木、天空、道路、人行道和商店]。 这些图像的标记是在仔细检查下完成的,以确保对象总是以相同的方式标记,关
-
argoverse数据集
共享argoverse针对的任务:3d追踪和动作预测,两个任务对应的数据集其实是独立的,只是采集设备和采集地点一样而已。提供了360度的视频和点云信息,并根据点云重建了地图,全天候全光照。标注了视频和点云中的3d bounding box。3d追踪的数据集包含113段15-30秒的视频,动作预测中包含323,557段5秒的视频(总计320小时)。数据集的主要亮点还是在原始数据和地图的联动上。
-
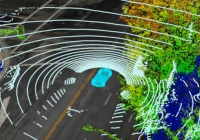
lidar 2d深度图像数据集
共享该数据集包含 2d 深度图像,如下图所示。像 kitti 数据集中的 360 度 lidar 框架在传感器本身周围呈圆柱形。该数据集中的 2d 深度图像可以表示为您在 lidar 框架的圆柱体上进行了切割并将其拉直以位于 2d 平面中。这些 2d 深度图像的像素代表反射物体与 lidar 传感器的距离。 2d 深度图像的垂直分辨率(在我们的例子中为 64)表示用于扫描周围环境的 lidar 传感器
-

lytro illum
共享数据集介绍: 收集了 640 个在大小、纹理、背景杂波和照明等方面具有显着变化的光场。生成微透镜图像阵列和中心观察图像,并生成相应的地面实况图。 citation if you find our paper and repo useful, please cite our paper. thanks! @article{zhang2020, title={light field sa

客服微信